Moving on to the “tangible”
We were still focused on the theoretical and contextual part of the project until today, and then we decided to move on to the more practical part. The transition from the intangible exploration to the tangible required us to consider and then trying out different sensors and devices that we thought would make sense to our concept, or at least some qualities of it. We decided to go back a little, and look at the whole picture, and asked ourselves what we really wanted to show with our design.
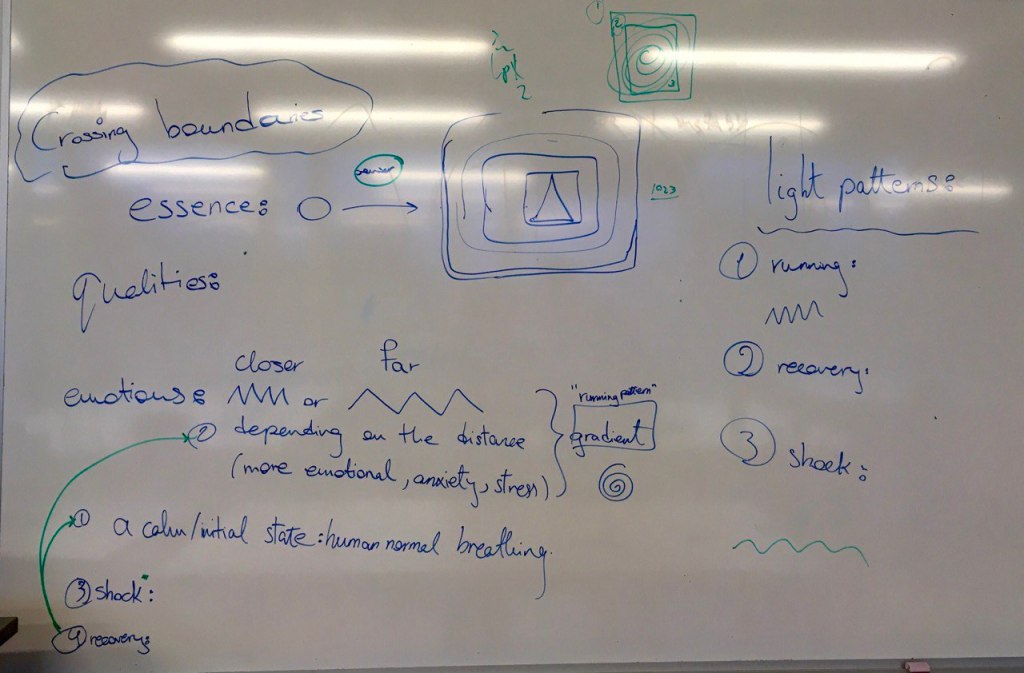
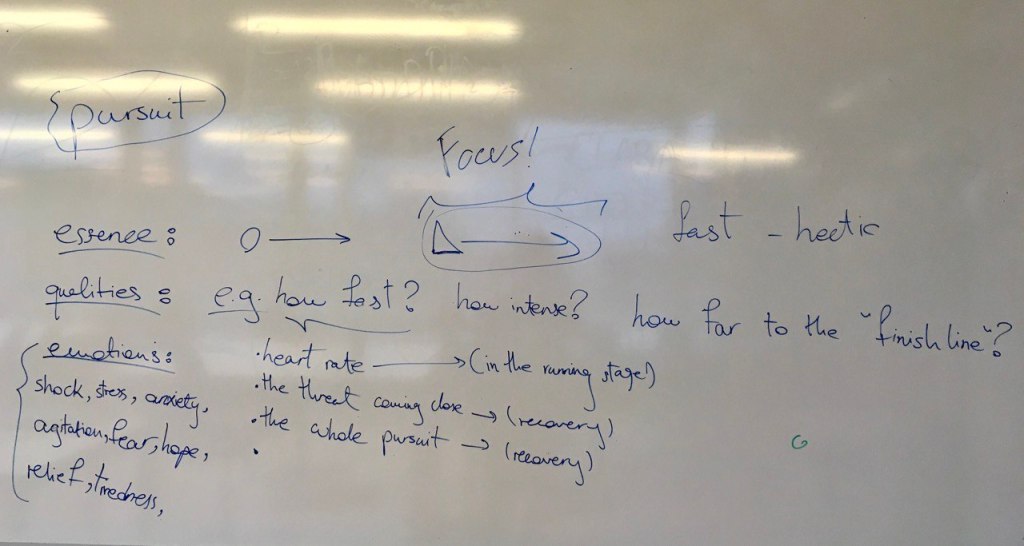
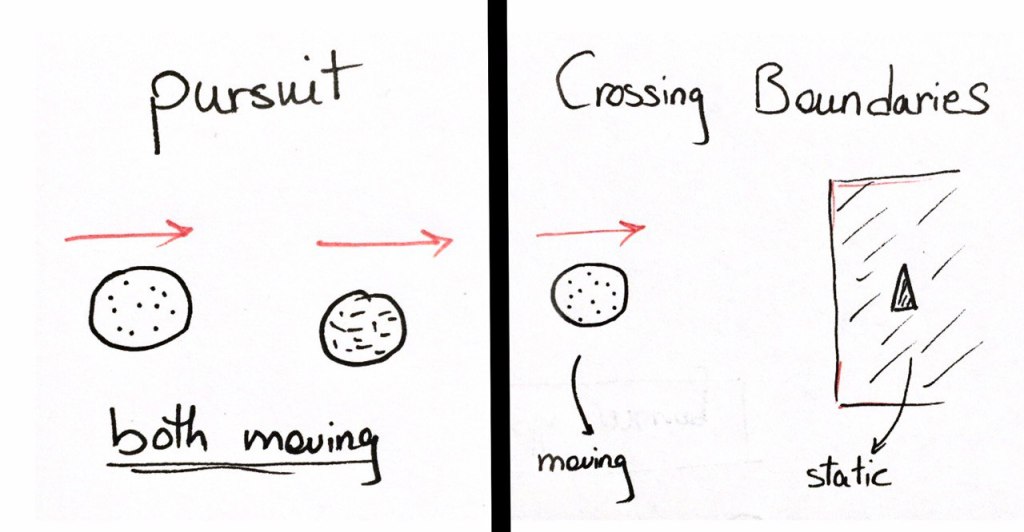
We quickly realized if we wanted to use the proximity meter, we have to adapt the concept so that it would work with how this sensor works and what kind(s) of information it is able to get. After playing around with the sensor, and knowing it has a range of sensitivity from 2cm to 4m, we realized it would be interesting to try a concept we called “crossing boundaries”. We decided to “extract” a few of the emotions and qualities from the pursuit concept and apply it to the new one.
We have started to experiment with the ultrasonic sensor a.k.a. proximity meter. The range of this particular type of sensor starts from 2cm and goes up to 4m, the accuracy is 3mm. Our concept of pursuit has distance as one of its core variables that affects the outcome. So we thought it could be relevant to use a proximity meter when going into the tangible part of the project. We thought of the possible nuances we could have in the interaction, using this particular sensor. So we asked is it possible to mix this sensor with another, e.g. the micro Servo, to give it a more smart movement? This required the sensor to get angled all the time, which brought us to the conclusion that, unless the sensor would be somehow moved vertically(without changing its angle), the receiver part of the sensor wouldn’t be able to get the reflection of the sound waves. The essence of the idea seemed pretty interesting, but we needed more time to look more into it.
Micro servo as the sensor
We played around with the micro Servo; we had some ideas that would have had “pursuit” as the concept. The idea was to implement the movement part of the concept by the Servo rotating 180 degrees, making it possible for the pursued and the pursuer to move. The two components in this scenario would have been a photosensor, as the pursued, and a single led (or a light source of any kind that could be controlled), as the pursuer. The light source would have been the input with which we could have interacted with the artefact. A high power led was going to be our output, “expressing” the light patterns. One of the factors that made us drop the idea was the contradiction in the interaction between the input and output, i.e. the photosensor is “escaping” from the light source, but at the end, its output, which was supposed to express its emotions, was a light itself. Another paradox in the mentioned idea is the fact that a photosensor’s essence is to sense the light, whereas, in the “pursuit” context, the pursued is running away from the pursuer, because the two entities do not match, and the latter is a threat to the former, which is not the case about the relationship between a light and a photosensor, at all.